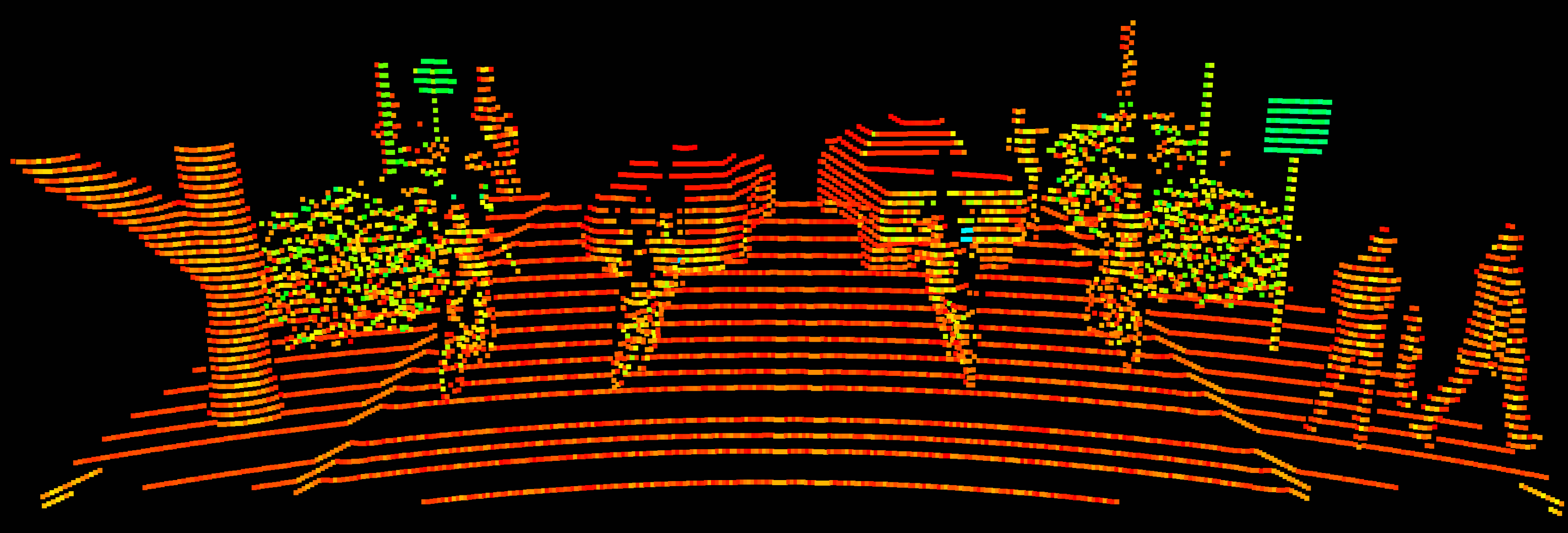
Intensity Values
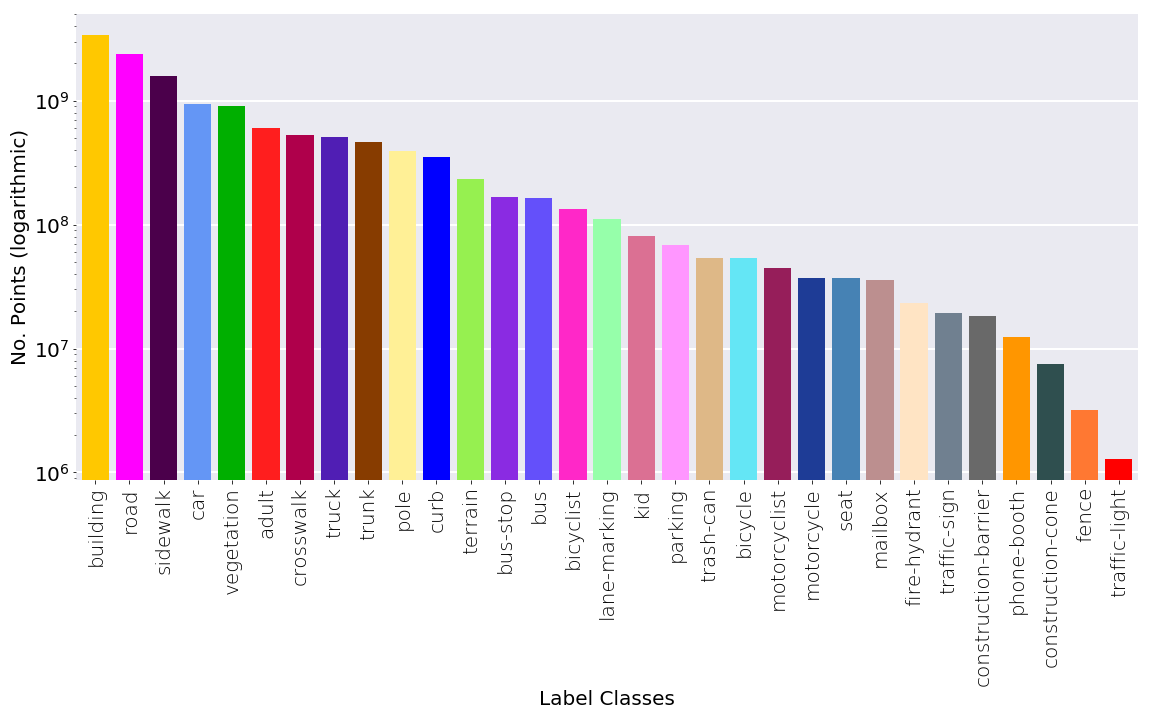
Point-Wise Semantic Labels
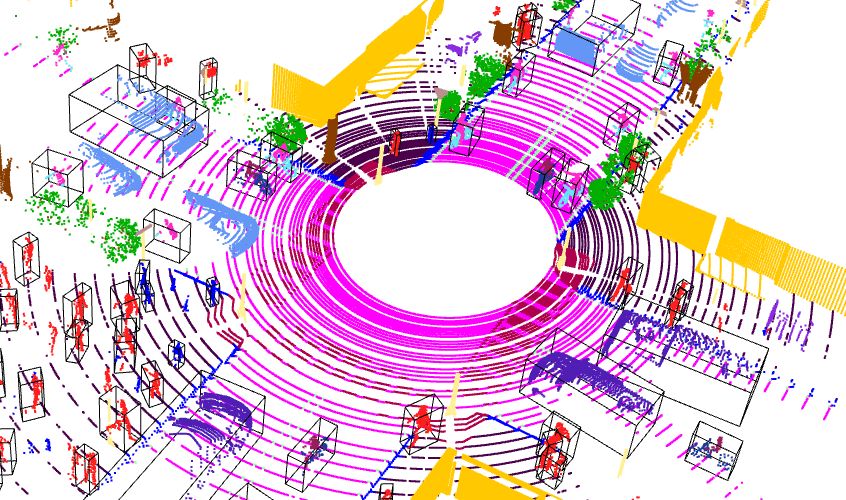
3D Bounding Boxes
Khaled Saleh, Mo Hossny, Ahmed Abobakr, Mohammed Attia, Julie Iskander
What is VoxelScape dataset? The VoxelScape dataset is a large-scale simulated point cloud dataset of urban traffic environements. It contains total 100K point cloud LiDAR scans of diverse urban traffic scenarios and their ground-truth annotations. Each point cloud scan includes a fine-detailed point-wise semantic labels and reflectance intensity as well as 3D bounding boxes annotations.
Characteristics
Intensity Values
Point-Wise Semantic Labels
3D Bounding Boxes
If you use the VoxelScape dataset please cite:
@article{title={VoxelScape: Large Scale Simulated 3D Point Cloud Dataset of Urban Traffic Environments},
author={Saleh, Khaled and Hossny, Mohammed and Abobakr, Ahmed and Attia, Mohammed and Iskander, Julie},
journal={IEEE Transactions on Intelligent Transportation Systems},
year={2023},
volume={},
number={},
pages={1-14},
doi={10.1109/TITS.2023.3271414}}
The dataset provided on this page are published under the Creative Commons Attribution-NonCommercial 4.0 International License . This means you can use it for research and educational purposes but you must give appropriate credit, provide a link to the license, and indicate if changes were made. You may do so in any reasonable manner, but not in any way that suggests the licensor endorses you or your use. We make no representations or warranties. You may not use the material for commercial purposes, for commercial licensing please contact us at khaled.saleh[at]ieee.org. The code is provided under the MIT license.
The dataset is available for download as indvidual zipped sequence folders.
Use the code in our github repository to visualize and process the dataset.




